文献情報
| タイトル | |
|---|---|
| GRAB:VRコントローラに握力感知機能を追加する拡張センサ | |
| 著者 | |
|
|
| アブストラクト | |
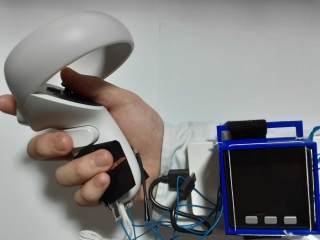
VRコントローラには,握力で操作する機能は一般的には搭載されていない.VRコントローラに握力感知機能を追加できれば,握り潰しの操作を行うことができるなど,コンテンツ表現の幅が広がる.そこで本研究では,既存のVRコントローラに巻きつけるだけで握力感知機能を追加するベルト状センサGRABを開発する.GRABの有効性を検証するため,VRテストアプリを実装して評価実験を実施した.評価実験の結果,想定通りの操作が可能であることが確認できた.また,任意の握力強度に調整することが困難という課題も明らかとなった. |
|
| 雑誌名 | |
| インタラクション2024論文集 © 2024 情報処理学会 |
|
| 論文ID | |
| 1A-09 | |
| ページ | |
| 216-220 | |
| 発行日 | |
| 2024年2月28日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |