文献情報
| タイトル | |
|---|---|
| 仮想物体把持における物体変形を用いた視覚フィードバック | |
| 著者 | |
|
|
| アブストラクト | |
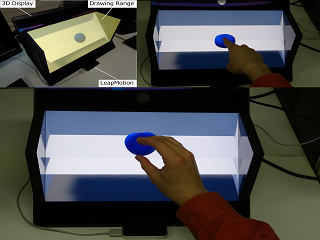
本研究では,VR/AR環境において仮想物体を把持する際に,手指がめり込むことによって生じる問題を解決するために,物体の変形を利用した視覚フィードバックを提案する.本システムではハンドトラッキングによって手指の位置姿勢を取得し,手指の形に合わせて仮想物体を変形させることで,仮想物体へのめり込みを防ぐ.物体の変形は物理シミュレーションにより実現した.変形する球体を実装し,仮想の手指にプリミティブなコライダーを設定することで仮想物体への手指のめり込みのない把持操作を実現した.また動作の様子を3Dディスプレイ上で表示し,表示されている仮想物体をユーザーが自身の手指で把持操作できることを確認した. |
|
| 雑誌名 | |
| インタラクション2024論文集 © 2024 情報処理学会 |
|
| 論文ID | |
| 3A-08 | |
| ページ | |
| 1096-1099 | |
| 発行日 | |
| 2024年2月28日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |