文献情報
| タイトル | |
|---|---|
| Transtiff: 人工筋肉機構による硬軟変化関節を備えた棒状触覚デバイスの提案 | |
| 著者 | |
|
|
| アブストラクト | |
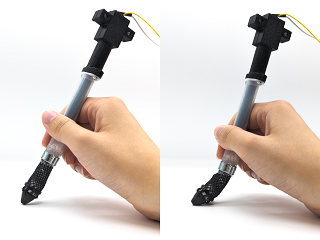
私たちは生活の中で,日常的に箸やペンに代表される「棒状物体」を操作している.手から得られる微細な感触の変化を知覚することで,巧みな棒状物体の操作を可能にしているとともに,棒状物体の先端で触れる対象物を間接的に感じ取ることができる.本研究ではそうした手で把持する棒状物体によるインタラクションに着目し,動的に硬軟変化する関節を備えた棒状デバイスである"Transtiff"を提案する.一般的に曲げることができない棒状の物体に対し,Transtiffでは操作する棒の硬さを変化して知覚させることで,棒状物体の特性やそれを介して触れる対象物の硬さが変化したかのように感じさせることを狙う.本デバイスは人工筋肉の機構を採用し,小型のモータを利用したピストン機構によって,柔軟なチューブの中で液体への圧力を制御することで,関節の硬軟制御を行う.デバイスの性能評価として,硬度測定実験と剛性測定実験を実施した.その結果,Transtiffの硬度は一般的な輪ゴムからタイヤ程度の硬さまで変化し,剛性は特定の条件で最大4.33倍に増加することを確認した.また,本デバイスを用いたアプリケーションを実装し,デモンストレーションを実施した結果,Transtiffがペンやブラシに類似した触覚を提供できることが分かった. |
|
| 雑誌名 | |
| インタラクション2024論文集 © 2024 情報処理学会 |
|
| 論文ID | |
| INT24005 | |
| ページ | |
| 41-49 | |
| 発行日 | |
| 2024年2月28日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |