文献情報
| タイトル | |
|---|---|
| ソーシャルタッチにおける多様な接触動作を即時識別する柔軟なセンサの開発 | |
| 著者 | |
|
|
| アブストラクト | |
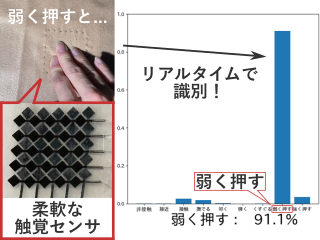
人と触れ合うことは相手との親しみを強めたり感情を伝えたり様々な効果があることが知られている.ロボットも人との触れ合いにおいて適切な反応を返すことができれば,それらの効果が得られる可能性がある.そこで本研究では,導電性シリコンゴムを電極として使用した薄く柔軟な静電容量方式の触覚センサを開発した.このセンサの表面に人肌の柔軟性を持つ表面素材と布を貼り付け,16人の実験参加者から9つの接触動作(非接触,接近,接触,撫でる,叩く,弾く,くすぐる,弱く押す,強く押す)における静電容量の時系列データを取得した.この時系列データを用いて,9動作を識別するLSTM(Longshort-term memory)モデルを構築した.その結果,学習データ,検証データに含まれない実験参加者のデータで構成されたテストデータにおいて平均で85.5%と高い正解率で識別することが可能であることが分かった.また,約0.01秒の遅延で識別結果が得られることを確認し,我々の触覚センサを用いてほぼリアルタイムに接触動作に対する反応を返すことが可能であることを示した. |
|
| 雑誌名 | |
| インタラクション2024論文集 © 2024 情報処理学会 |
|
| 論文ID | |
| INT24006 | |
| ページ | |
| 50-59 | |
| 発行日 | |
| 2024年2月28日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |