文献情報
| タイトル | |
|---|---|
| SpiMan:ウェアラブル触手型機構を用いた人間拡張デバイスの提案 | |
| 著者 | |
|
|
| アブストラクト | |
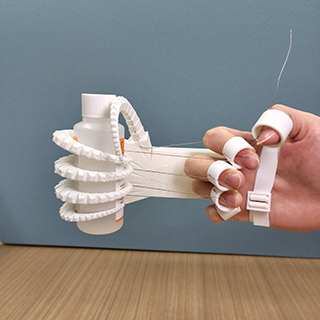
本研究では,柔軟性と有機的な動きを実現するソフト・マニピュレータ,ウェアラブル触手型ロボットアームデバイス (SpiMan) の開発を視野に,SpiMan のプロトタイプと SpiMan の設計支援システムを提案する.本デバイスは複数本のケーブルによって制御され,ケーブルを巻き取ることによってらせん状に収まる構造となっている.設計には 3 次元モデリングソフト Rhinoceros を用いており,6 つのパラメータにより曲がる角度や長さ,太さを自由に変更できる.また,本デバイスを装着し,物体を把持できることを確認できた. |
|
| 雑誌名 | |
| インタラクション2025論文集 © 2025 情報処理学会 |
|
| 論文ID | |
| 1A-04 | |
| ページ | |
| 237-241 | |
| 発行日 | |
| 2025年2月23日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |