文献情報
| タイトル | |
|---|---|
| ぬいぐるみ型コントローラにおけるAI学習の効率化手法の提案とそれに伴う利便性の向上 | |
| 著者 | |
|
|
| アブストラクト | |
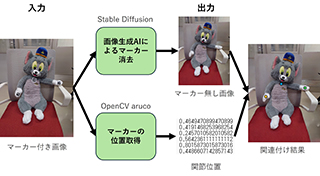
これまでに,高齢者や幼児,身体障害者といったユーザのゲーム操作におけるアクセシビリティ向上を目指し,ぬいぐるみ型コントローラを開発してきた,しかし,コントローラの中核を担う骨格推定AIの学習工数の多さが問題となっていたが,本研究ではAIの学習用データを半自動的に生成するシステムを提案することで,この問題の解決を図った.具体的には,PythonのOpenCVとArUcoを利用した自動ラベリング,Stable Diffusionによるマーカー自動消去,さらに転移学習の活用により,学習用データ生成の大幅な効率化を実現した.また,本システムにより複数のぬいぐるみの同時利用を想定した学習データを作成し,YOLOv8を用いた物体識別および骨格推定の精度を評価する実験を行った.その結果,提案システムの利用により高い精度で骨格推定が可能となり,高い汎用性を獲得できた.これにより,多様な用途やユーザ層への対応可能になった.本稿では提案システムの設計,実験結果,ならびに今後の課題について詳述する. |
|
| 雑誌名 | |
| インタラクション2025論文集 © 2025 情報処理学会 |
|
| 論文ID | |
| 2B-22 | |
| ページ | |
| 713-716 | |
| 発行日 | |
| 2025年2月23日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |