文献情報
| タイトル | |
|---|---|
| Sketch2Joints: スケッチベースロボットアームのデザイン支援インターフェースの研究開発 | |
| 著者 | |
|
|
| アブストラクト | |
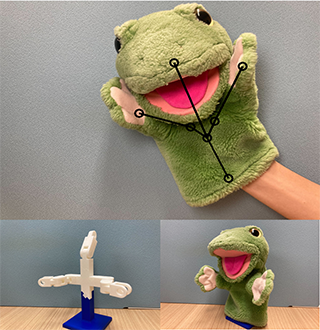
概要:家庭用 3D プリンタの普及により,3D モデルの立体化は身近なものになったが,依然としてロボットアームの製作は困難である.そこで本研究では,直感的な操作で関節機構を作成し,3 D プリンタでロボットアームの制作を行うシステムSketch2Jointsを開発した.ユーザのスケッチから関節位置と関節種類を読み取って関節機構を設計し,設計したデータを基にロドリゲスの任意軸回りの公式回転を用いて運動学的シミュレーションを行うことで,これを実現する.ユーザ実験として,ぬいぐるみ内部に挿入する関節機構を設計し,実際に製作して,イメージ通りの動作をするかを確認した.また,System Usability Scale(SUS) に基づくアンケートにより UI の使いやすさを評価した. |
|
| 雑誌名 | |
| インタラクション2025論文集 © 2025 情報処理学会 |
|
| 論文ID | |
| 2B-49 | |
| ページ | |
| 824-829 | |
| 発行日 | |
| 2025年2月23日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |