文献情報
| タイトル | |
|---|---|
| 没入型VR体験と現実世界を繋ぐエージェントロボット | |
| 著者 | |
|
|
| アブストラクト | |
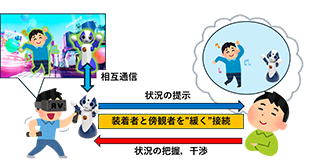
近年,HMDの低価格化により屋外など他者と共有する空間においてVRが活用されるようになってきた.しかし,HMD装着者と非装着者ではインタラクションの場の共有が難しいため,共有空間におけるVR活用の妨げになる懸念がある.そこで本研究では,HMD装着者と非装着者が互いにインタラクションを開始しやすくなるエージェントロボットによる仲介システムを提案する.場を共有する周囲の人々の位置を広範囲に計測可能な2D-LiDARを用いて計測し,エージェントロボットが周囲の人物に対してVR体験に参加しているような様子の暗黙的表示や挨拶レベルの応対といった間接的なインタラクションを提供する.また,同じパーソナリティを持ったVRエージェントアバターが外界の様子をHMD装着者に抽象的に伝達する.HMD非装着者がHMD装着者に対し直接的に声かけをするタスクにおいて,間接的な表現が話しかけに対する驚きや恐怖心を低減する可能性が見られた. |
|
| 雑誌名 | |
| インタラクション2025論文集 © 2025 情報処理学会 |
|
| 論文ID | |
| 3A-13 | |
| ページ | |
| 1058-1062 | |
| 発行日 | |
| 2025年2月23日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |