文献情報
| タイトル | |
|---|---|
| マッキンベン型人工筋肉を用いた握手提示のための力センシングに基づくフィードバック制御システムの基礎研究 | |
| 著者 | |
|
|
| アブストラクト | |
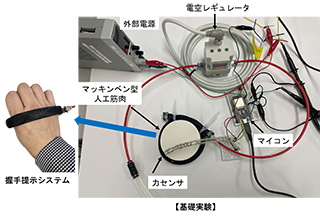
空気圧を利用したマッキンベン型人工筋肉アクチュエータは,これまでに触覚インタフェースにも広く使用されている.本研究では,力強い人工握手を提示するために人工筋肉を用いる.人の手の形状は様々であるため,力センサのセンシング結果を基に空気圧をフィードバック制御するシステムを構築するための基礎的なデータを収集した. |
|
| 雑誌名 | |
| インタラクション2025論文集 © 2025 情報処理学会 |
|
| 論文ID | |
| 1P-85 | |
| ページ | |
| 562-566 | |
| 発行日 | |
| 2025年2月23日 | |
| 発行所 | |
| 発行人 | 一般社団法人 情報処理学会 |
| 住所 | 〒101-0062 東京都千代田区神田駿河台一丁目5番地 化学会館4F |
| TEL. | 東京 (03) 3518-8374 (代表) |
| sig@ipsj.or.jp | |